
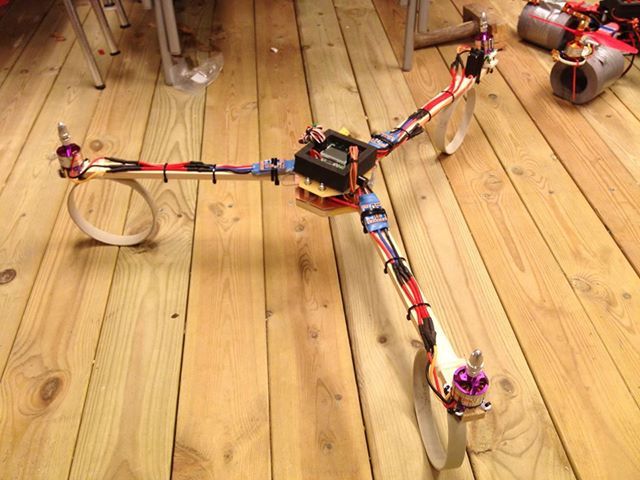
Test: Byg en billig robust Tricopter
Gæsteartikel d. 27. oktober. 2013, skrevet af The Boss 24 Kommentarer. Vist: 9786 gange.
Korrekturlæser:
Billed behandling:
Oversættelse: The Boss
Pristjek på http://www.pricerunner.dk 0,00
Produkt udlånt af: n/a
DK distributør: n/a
Billed behandling:
Oversættelse: The Boss
Pristjek på http://www.pricerunner.dk 0,00
Produkt udlånt af: n/a
DK distributør: n/a









#1

Er det ikke noget ala det samme som http://rcexplorer.se/projects/...
Her overvejet en del om at man ikke skulle til at starte på sådan et projekt, syntes bare at modtager og sender koster en del mere end hvad jeg vil give.
Kan desværre ikke bruge den fra min Nitro bil.
Her overvejet en del om at man ikke skulle til at starte på sådan et projekt, syntes bare at modtager og sender koster en del mere end hvad jeg vil give.
Kan desværre ikke bruge den fra min Nitro bil.

#3

jo, jeg har hentet en del inspiration fra RC Explorer .. men som du kan se sidder elektronikken frit eksponeret på hans version, jeg har valgt at gemme det væk inde i skroget så det er optimalt beskyttet. RC Explorer bygger primært til FPV...
Samtidig er mine base frame plader så simple at de kan skæres med helt almindelig værktøj, da der ikke er nogen buer eller lignede.
Modtager og sender behøver ikke være dyre, du kan komme igang med en simpel 6ch løsning fra hobbyking til ca. 25USD som både indeholder sender og modtager:
http://hobbyking.com/hobbyking...
/HeO
Samtidig er mine base frame plader så simple at de kan skæres med helt almindelig værktøj, da der ikke er nogen buer eller lignede.
Modtager og sender behøver ikke være dyre, du kan komme igang med en simpel 6ch løsning fra hobbyking til ca. 25USD som både indeholder sender og modtager:
http://hobbyking.com/hobbyking...
/HeO
#4
kunne godt se nogle ligheder.
Kan godt lide dit projekt, det ser godt ud. 🙂
Mange tak for linket. Det er nu en del billigere end hvad jeg har set på Danske Webshops.
Det kunne da være at man skulle se at få lavet en bestilling hos hoppyking. De har jo også de andre dele som man skal bruge, så er der lidt at lave i vinter perioden.
Kan godt lide dit projekt, det ser godt ud. 🙂
Mange tak for linket. Det er nu en del billigere end hvad jeg har set på Danske Webshops.
Det kunne da være at man skulle se at få lavet en bestilling hos hoppyking. De har jo også de andre dele som man skal bruge, så er der lidt at lave i vinter perioden.

#6

Hvis man nu selv vil prøve, kan man så ved evt. problemer, hente lidt hjælp ved dig?
Eller vil du gerne holdes uden for andres projekter, det er jo en ærlig sag, hvis det er 😛
Eller vil du gerne holdes uden for andres projekter, det er jo en ærlig sag, hvis det er 😛
#7
Har du rodet meget med P I Gains? Jeg har stadig ret svært ved at få min sat rigtigt op 😕
#8
Jeg er på ingen måde ekspert i multirotor, men jeg har da lidt erfaring efterhånden. Jeg hjælper gerne med svare spørgsmål, men da jeg i sagens natur ikke kender dit faglige niveau kan jeg ikke garantere resultatet...
Jeg flyver pt med stock settings, men er heller ikke færdig med at trimme.
Jeg flyver pt med stock settings, men er heller ikke færdig med at trimme.
#9

Jeg kan ikke helt se hvorfor man partout skal sende endnu et nyhedsbrev ud en time efter man allerede havde sendt sit almindelige ud, blot for at få det her med. Det kunne godt have ventet til næste nyhedsbrev :)
- Dozer
- Dozer
#10

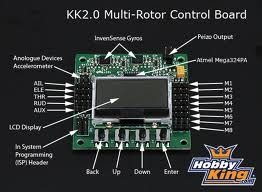
Vælger man at bruge KK2.0´eren så HUSK at opgrader firmware. Du kan eventuelt linke til et af mange værktøjer der er til formålet.
Derudover bør i lige nævne hvilke regler der skal overholdes når man flyver med disse.
Det er ikke synderligt smart at skrive "hvor quad'en begyndte at drive ind over nogle huse"
Læs luftfartsstyrelsens BL9.4 og derved tilhørende tillæg:)
ud over det, fint projekt. Har selv bygget en quadcopter helt fra bunden som kan ses på www.hps.dk .
Jeg valgte da at smide de 1000 kroner ekstra i at få en ordentlig flight controller, og har ikke fortrudt det en dag siden. KK 2.0´eren er fin nok til at begynde med, men man kommer MEGET hurtigt til at savne en gps funktion - Specielt hvis man flyver FPV.
En naza lite kan anbefales herfra. Nem at komme igang med, og flyver super godt.
Et par videoer jeg har lavet kan findes her:
http://www.youtube.com/user/me...
Derudover bør i lige nævne hvilke regler der skal overholdes når man flyver med disse.
Det er ikke synderligt smart at skrive "hvor quad'en begyndte at drive ind over nogle huse"
Læs luftfartsstyrelsens BL9.4 og derved tilhørende tillæg:)
ud over det, fint projekt. Har selv bygget en quadcopter helt fra bunden som kan ses på www.hps.dk .
Jeg valgte da at smide de 1000 kroner ekstra i at få en ordentlig flight controller, og har ikke fortrudt det en dag siden. KK 2.0´eren er fin nok til at begynde med, men man kommer MEGET hurtigt til at savne en gps funktion - Specielt hvis man flyver FPV.
En naza lite kan anbefales herfra. Nem at komme igang med, og flyver super godt.
Et par videoer jeg har lavet kan findes her:
http://www.youtube.com/user/me...
#11

#9
Nej, det beklager vi - der var lidt problemer i mailserveren mht. udsendelse af nyhedsbreve, så de kom til at ligge i kø.
Nej, det beklager vi - der var lidt problemer i mailserveren mht. udsendelse af nyhedsbreve, så de kom til at ligge i kø.
#12
Sådan en tricopter er nu en herlig ting, og følelsen ved at flyve sin helt egen hjemmebyggede er fantastisk 😲
Jeg er stadig i begynderstadiet og har derfor meget at lære endnu. Hvis det skulle have interesse er her en kort video af første gang jeg flyver med mit build v2:
http://www.youtube.com/watch?v...
Jeg er stadig i begynderstadiet og har derfor meget at lære endnu. Hvis det skulle have interesse er her en kort video af første gang jeg flyver med mit build v2:
http://www.youtube.com/watch?v...
#13

Har du prøvet med noget FPV ?
Og findes det ikke nogen alternative controllere, lidt i retning af at slutte en ps3 gamepad til i stedet? :)
Og findes det ikke nogen alternative controllere, lidt i retning af at slutte en ps3 gamepad til i stedet? :)
#14
#10 og #12 det er nogle fine projekter i har kørende. I like it 🙂 Det er det fine ved denne hobby at der kan varieres i det uendelige.
TCOP er dog ikke bygget til FPV men til trick flyvning, derfor har jeg brugt 1350KV motorer med små propeller 8x4" det gør den mere responsiv og ikke nær så vind følsom.
Det er klart der findes langt bedre flight kontrollere KK2.0, men den er billig og så meget nemmere at håndtere i felten på grund af displayet. Til trick flyvning er GPS ikke nødvendigt.
En der virklig kan presse en tricopter med KK2.0 er en fyr der kalder sig hallstudio, prøv at se hvad han kan når han folder sig ud.
https://www.youtube.com/watch?...
Man kan kun håbe på man engang bliver lige så god 😉
#10 Fint du påpeger gældende lovgivning på området, som naturligvis skal overholdes.
TCOP er dog ikke bygget til FPV men til trick flyvning, derfor har jeg brugt 1350KV motorer med små propeller 8x4" det gør den mere responsiv og ikke nær så vind følsom.
Det er klart der findes langt bedre flight kontrollere KK2.0, men den er billig og så meget nemmere at håndtere i felten på grund af displayet. Til trick flyvning er GPS ikke nødvendigt.
En der virklig kan presse en tricopter med KK2.0 er en fyr der kalder sig hallstudio, prøv at se hvad han kan når han folder sig ud.
https://www.youtube.com/watch?...
Man kan kun håbe på man engang bliver lige så god 😉
#10 Fint du påpeger gældende lovgivning på området, som naturligvis skal overholdes.
#15
#13 ja, jeg har prøvet FPV ...
Min første tricopter var tænkt til FPV, du kan se tricopteren her: http://diytricopter.com/wp2/fi...
Udbygget med en holder til kameraet her.
http://diytricopter.com/wp2/th...
Det var kun et hurtigt forsøg, og der var en del problemer med vibrationer. Tænker måske over vinteren at gøre det rigtig, og bygge en version af TCOP til FPV, hvor jeg måske flytter fight controlleren længere tilbage for at lave et ordentligt areal til kamera montering. Har også en MultiWii flight controller som kan tage GPS liggende, så måske skal den i spil. let's see.
Kender ikke rigtig til andre typer af standard controllere end de normale Heli controllere.
Min første tricopter var tænkt til FPV, du kan se tricopteren her: http://diytricopter.com/wp2/fi...
Udbygget med en holder til kameraet her.
http://diytricopter.com/wp2/th...
Det var kun et hurtigt forsøg, og der var en del problemer med vibrationer. Tænker måske over vinteren at gøre det rigtig, og bygge en version af TCOP til FPV, hvor jeg måske flytter fight controlleren længere tilbage for at lave et ordentligt areal til kamera montering. Har også en MultiWii flight controller som kan tage GPS liggende, så måske skal den i spil. let's see.
Kender ikke rigtig til andre typer af standard controllere end de normale Heli controllere.
#16
#13 ja, ok... FPV var det jo nok ikke... da der ingen live transmission var til jorden, men optagelse på SD kort... 😉
#17
http://bitcraze.se har en micro Quadcopter, som er en semi selvbyg..
Det vil sige at man bare skal lode de 4 motore på og den er klar til at flyve.
hvis man så synes den er lidt kedelig, så kan man modde den evt selv skrive et program til den eller bruge et af de expansion pins feks. et lille camera.
Det vil sige at man bare skal lode de 4 motore på og den er klar til at flyve.
hvis man så synes den er lidt kedelig, så kan man modde den evt selv skrive et program til den eller bruge et af de expansion pins feks. et lille camera.
#18
Syntes som udgangspunkt at de er fede og da jeg har med videoovervågning at gøre til daglig, også trådløs, kunne det være sjovt at montere et kamera på undersiden men hvorfor er propellerne så små.
De skal vel køre med rigtig høj hastighed for at yde lift nok og det bruger strøm. Har du prøvet med større propeller og så langsommere omd/min.
Jeg har et komplet Graupner 8 kanals fjernstyringskit liggende og er ret hooked på det men vil hellere have en CH-47 Chinook, frem for en AH-64 Apache. (hvis du forstå).
De skal vel køre med rigtig høj hastighed for at yde lift nok og det bruger strøm. Har du prøvet med større propeller og så langsommere omd/min.
Jeg har et komplet Graupner 8 kanals fjernstyringskit liggende og er ret hooked på det men vil hellere have en CH-47 Chinook, frem for en AH-64 Apache. (hvis du forstå).
#19

14
Jesus fucking christ, den mand burde få nogen til at optage med at ordentligt kamera, han er jo for vild med den flyvemaskine.
Jesus fucking christ, den mand burde få nogen til at optage med at ordentligt kamera, han er jo for vild med den flyvemaskine.
#20
#18 jeg bruger små propeller fordi TCOP er lavet til Trick flyvning... Det er helt rigtig hvis man vil lave en stabil kamera platform så skal men bruge større propeller på langsommere motorer. Sådan har jeg også i arsenalet... her bruger jeg typisk en 700KV motor med en 12x4.5" propel, hvor TCOP kører med 8x4" på 1350KV motor, så det er næsten dobbelt op i RPM
Det ser godt nok lækker ud det udstyr Graupner laver...
#14 Jeps, han kan sit kram.... men nu er Tricopteren også ekstremt manøvredygtig...
Det ser godt nok lækker ud det udstyr Graupner laver...
#14 Jeps, han kan sit kram.... men nu er Tricopteren også ekstremt manøvredygtig...
#21

Jeg kan varmt anbefale "Bat bone" tricopteren til folk, der gerne vil starte med et design, der virker rigtig godt.
http://www.youtube.com/watch?v...
Hvis jeg selv skulle igang med noget DIY ville jeg lave et gunship i stil med dette(Man er vel et legebarn):
http://www.youtube.com/watch?v...
Men der er masser af muligheder. Jeg flyver selv kun single rotor helier i øjeblikket.
http://www.youtube.com/watch?v...
Hvis jeg selv skulle igang med noget DIY ville jeg lave et gunship i stil med dette(Man er vel et legebarn):
http://www.youtube.com/watch?v...
Men der er masser af muligheder. Jeg flyver selv kun single rotor helier i øjeblikket.
#22
Dejligt grej... og lækkert grej som de drenge kan komme op med... kan klart anbefale at følge gutterne på Flitetest - http://www.youtube.com/user/fl...
Det gunship er den for fed en ide... men hvis man er begynder kan jeg ikke anbefale disse avancerede modeller før man har lært at flyve, for både bat bone og gunship modellen går alvorligt i stykker hvis de ramme jorden... generelt er FPV/gopro modellerne er rigtig fine, men der er sku lidt mormor flyvning over det...
BTW prøvede at flippe TCOP for første gang i dag, det gik ikke helt godt så den måtte en tur i jorden... Man lære det jo ikke, hvis man ikke prøver 😲
Damage report og forbedringer her:
http://diytricopter.com/wp2/tc...
Det gunship er den for fed en ide... men hvis man er begynder kan jeg ikke anbefale disse avancerede modeller før man har lært at flyve, for både bat bone og gunship modellen går alvorligt i stykker hvis de ramme jorden... generelt er FPV/gopro modellerne er rigtig fine, men der er sku lidt mormor flyvning over det...
BTW prøvede at flippe TCOP for første gang i dag, det gik ikke helt godt så den måtte en tur i jorden... Man lære det jo ikke, hvis man ikke prøver 😲
Damage report og forbedringer her:
http://diytricopter.com/wp2/tc...
#23
semi off topic:
http://www.youtube.com/watch?v...
men ret vilde ting styringen til sådan nogle quadcopters kan programmeres til
http://www.youtube.com/watch?v...
men ret vilde ting styringen til sådan nogle quadcopters kan programmeres til
#24
@Fredrik15
Meget imponerede ... specielt SkyNet kommentaren er ret sjov
Ingen tvivl om der kommer til at ske en masse over de kommende år mht. droner...
/heo
Meget imponerede ... specielt SkyNet kommentaren er ret sjov
Ingen tvivl om der kommer til at ske en masse over de kommende år mht. droner...
/heo